The problem we want to address is called the Nearest Neighbor
Problem: given a set of points ![]() and a point
and a point ![]() , determine which
point of
, determine which
point of ![]() is the nearest from
is the nearest from ![]() .
.
The first intuition we have is to use Delaunay Triangulation. Let
![]() be the Delaunay Triangulation of
be the Delaunay Triangulation of ![]() , is it the
case that the nearest point of
, is it the
case that the nearest point of ![]() is one of the three points
incident to the face of
is one of the three points
incident to the face of
![]() containing
containing ![]() ? Looking at
Figure 1, we see that it may not be the case.
? Looking at
Figure 1, we see that it may not be the case.
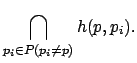
Now, lets reduce the size of the problem to the case where ![]() contains only two points
contains only two points ![]() and
and ![]() . In that case, the
bisectrix of
. In that case, the
bisectrix of ![]() and
and ![]() divides the plane into two halves (see
Figure 2), each of which containing the points respectively
nearest to
divides the plane into two halves (see
Figure 2), each of which containing the points respectively
nearest to ![]() and
and ![]() . This see this, first remember that the
bisectrix is defined as the set of points which are equidistant from
. This see this, first remember that the
bisectrix is defined as the set of points which are equidistant from
![]() and
and ![]() . Now, suppose that
. Now, suppose that ![]() is on the same half-plane as
is on the same half-plane as
![]() , and let
, and let ![]() be the intersection point between the bisectrix
and the segment
be the intersection point between the bisectrix
and the segment
![]() . We have that:
. We have that:
| (1) | |||
| (2) | |||
| (3) |
 |
This effectively form a partition of the plane, since (excepted
points on the boundaries) every point is in exactly one region.
Moreover, since the region of a point can be defined as the
intersection of ![]() half-planes (where
half-planes (where ![]() is the number of points
in
is the number of points
in ![]() ), each of those regions can be computed, using linear
programming, in
), each of those regions can be computed, using linear
programming, in
![]() . Since we have
. Since we have ![]() such regions to
compute, the whole set of those regions (which we shall call the
Voronoi Diagram of
such regions to
compute, the whole set of those regions (which we shall call the
Voronoi Diagram of ![]() and note
and note
![]() ) can then be
computed in
) can then be
computed in
![]() .
.
In the sequel, we will assume that no three points are collinear and no four points are cocircular.
What we are now interested in is to improve the time needed to
compute
![]() . We will show that
. We will show that
![]() is the
dual of
is the
dual of
![]() , and since computing the dual is an
operation which can be done in linear time, and computing
, and since computing the dual is an
operation which can be done in linear time, and computing
![]() can be done in
can be done in
![]() time, we will see that
time, we will see that
![]() can be computed in
can be computed in
![]() time as well.
time as well.
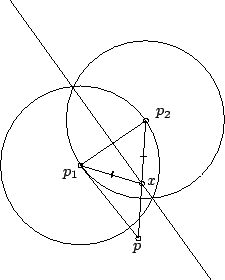
To see this, let ![]() be a vertex in
be a vertex in
![]() . That vertex is
formed by the intersection of some bisectrix (at least two) and let
. That vertex is
formed by the intersection of some bisectrix (at least two) and let
![]() ,
, ![]() and
and ![]() be some of the points used to define those
bisectrix (there are at least three such points otherwise we would
only have one bisectrix). This situation is illustrated on
Figure 3. Then, we have that
be some of the points used to define those
bisectrix (there are at least three such points otherwise we would
only have one bisectrix). This situation is illustrated on
Figure 3. Then, we have that ![]() is equidistant from
is equidistant from
![]() ,
, ![]() and
and ![]() , meaning that
, meaning that ![]() is the center of the circle
defined by
is the center of the circle
defined by ![]() ,
, ![]() and
and ![]() . We claim that this circle
contains no points of
. We claim that this circle
contains no points of ![]() . If that would be the case, then
. If that would be the case, then ![]() would
be nearer from that point than from
would
be nearer from that point than from ![]() ,
, ![]() and
and ![]() , and then
would not be on the boundaries of
, and then
would not be on the boundaries of ![]() ,
, ![]() and
and
![]() . Therefore, in
. Therefore, in
![]() , there is a Delaunay edge
between
, there is a Delaunay edge
between ![]() and
and ![]() , between
, between ![]() and
and ![]() , and between
, and between ![]() and
and ![]() . Notice that
. Notice that ![]() may not ne in the triangle we just
defined. We then showed that each edge in the dual of
may not ne in the triangle we just
defined. We then showed that each edge in the dual of
![]() is a Delaunay edge. To see that each Delaunay edge
is in the dual of
is a Delaunay edge. To see that each Delaunay edge
is in the dual of
![]() , similarly trace the unique
circle defined by the three vertices
, similarly trace the unique
circle defined by the three vertices ![]() ,
, ![]() and
and ![]() of a
Delaunay face. That circle is empty, and its center is equidistant
to each of the three vertices. We then have that this center is in
of a
Delaunay face. That circle is empty, and its center is equidistant
to each of the three vertices. We then have that this center is in
![]() , meaning that
, meaning that ![]() ,
,
![]() and
and ![]() are touching, and therefore each Delaunay
edge is in the dual of
are touching, and therefore each Delaunay
edge is in the dual of
![]() .
.
It is quite clear that for each ![]() ,
,
![]() . Therefore,
the number of faces in
. Therefore,
the number of faces in
![]() is equal to
is equal to ![]() , the number
of points in
, the number
of points in ![]() . Also, if we assume that no four points are
cocircular, we have that each vertex is of degree 3, and then:
. Also, if we assume that no four points are
cocircular, we have that each vertex is of degree 3, and then:
 |
|||
The last property of Voronoi Diagrams we want to discuss is their
relationship with Convex Hulls. We already know that ![]() is a
convex region for each
is a
convex region for each ![]() . Since
. Since
![]() form a
partition of the plane, some points must have unbounded regions. We
show that those points are exactly those lying on
form a
partition of the plane, some points must have unbounded regions. We
show that those points are exactly those lying on ![]() .
.
Let ![]() be a point that lies in
be a point that lies in ![]() . Then, there is a line
. Then, there is a line ![]() passing through
passing through ![]() such that all points of
such that all points of ![]() are on the same side
of
are on the same side
of ![]() . Let
. Let ![]() be the half-plane defined by
be the half-plane defined by ![]() not containing any
point of
not containing any
point of ![]() . Every point lying on the half-line perpendicular to
. Every point lying on the half-line perpendicular to
![]() and lying on
and lying on ![]() has
has ![]() as its nearest neighbor, and then
as its nearest neighbor, and then
![]() is unbounded.
is unbounded.
Now, let ![]() be unbounded. This means that there is a half-line
emanating from
be unbounded. This means that there is a half-line
emanating from ![]() such that every point on that half-line has
such that every point on that half-line has ![]() as its nearest neighbor. Let
as its nearest neighbor. Let ![]() be the line perpendicular to that
half-line and passing through
be the line perpendicular to that
half-line and passing through ![]() , and
, and ![]() be the half-plane defined
by
be the half-plane defined
by ![]() on which the half-line lies. No point of
on which the half-line lies. No point of ![]() can be in
can be in
![]() , otherwise, by going far enough on the half-line, we could find
a point
, otherwise, by going far enough on the half-line, we could find
a point ![]() that is nearer to
that is nearer to ![]() than
than ![]() (see
Figure 4). Therefore,
(see
Figure 4). Therefore, ![]() lies on
lies on ![]() .
.

![\includegraphics[scale=0.8]{hull.eps}](img47.png)